

Sonar pour non-voyant
L'application est conçue pour détecter les objets en hauteur (panneaux de signalisation, ...).

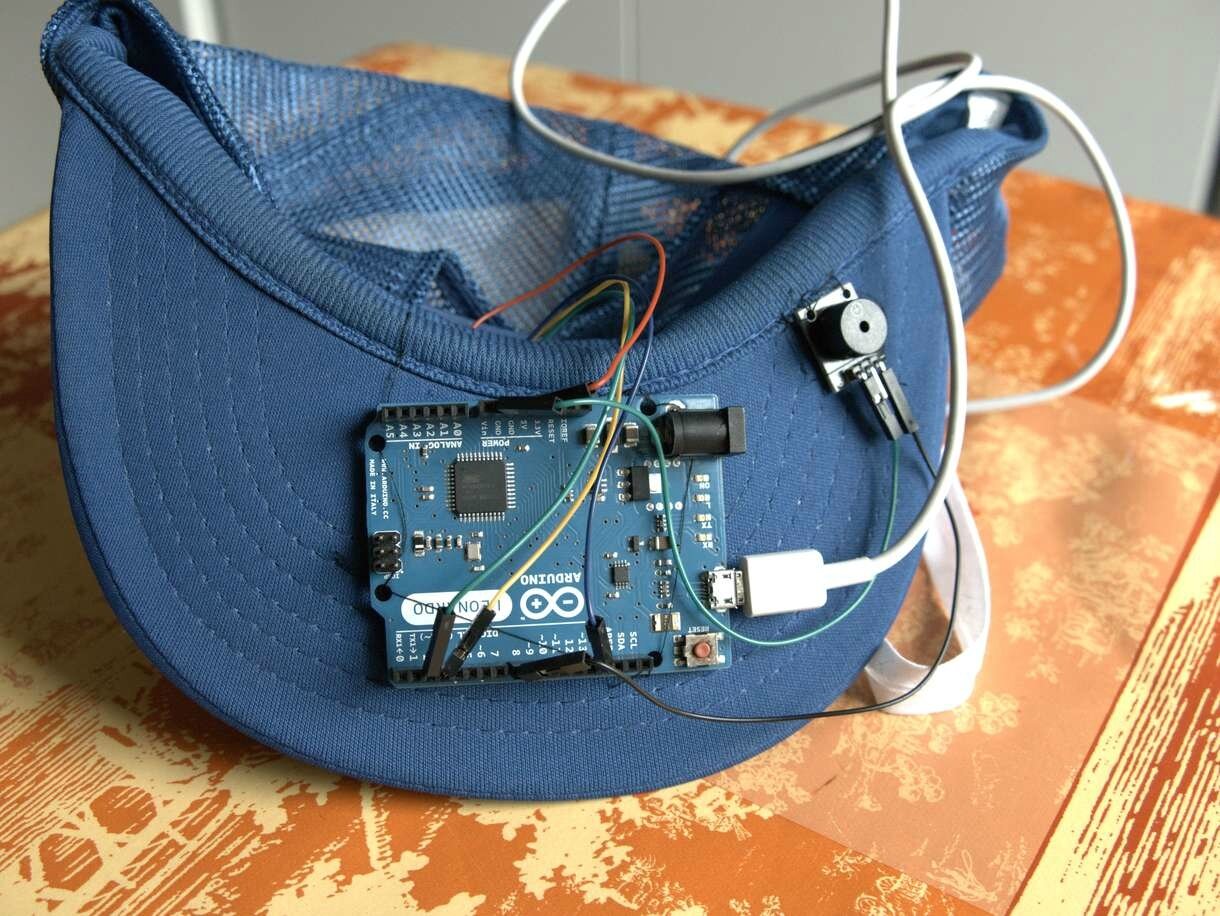
- Carte arduino leonardo
- Capteur ultrason HC-SR 04
- Buzzer KY-012 ou Toogoo R
Voici le code utilisé :
/*
* Code pour eva pour un capteur à ultrasons HC-SR04.
le son est sur le pin 8
*/
/* Constantes pour les broches */
const byte TRIGGER_PIN = 2; // Broche TRIGGER
const byte ECHO_PIN = 3; // Broche ECHO
/* Constantes pour le timeout */
const unsigned long MEASURE_TIMEOUT = 25000UL; // 25ms = ~8m à 340m/s
/* Vitesse du son dans l'air en mm/us */
const float SOUND_SPEED = 340.0 / 1000;
/** Fonction setup() */
void setup() {
/* Initialise le port série */
Serial.begin(115200);
/* Initialise les broches */
pinMode(TRIGGER_PIN, OUTPUT);
digitalWrite(TRIGGER_PIN, LOW); // La broche TRIGGER doit être à LOW au repos
pinMode(ECHO_PIN, INPUT);
}
/** Fonction loop() */
void loop() {
/* 1. Lance une mesure de distance en envoyant une impulsion HIGH de 10µs sur la broche TRIGGER */
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
/* 2. Mesure le temps entre l'envoi de l'impulsion ultrasonique et son écho (si il existe) */
long measure = pulseIn(ECHO_PIN, HIGH, MEASURE_TIMEOUT);
/* 3. Calcul la distance à partir du temps mesuré */
float distance_mm = measure / 2.0 * SOUND_SPEED;
long cm = distance_mm / 10;
/* Affiche les résultats en mm, cm et m */
Serial.print(F("Distance: "));
Serial.print(distance_mm);
Serial.print(F("mm ("));
Serial.print(cm);
Serial.print(F("cm, "));
Serial.print(distance_mm / 1000.0, 2);
Serial.println(F("m)"));
if (cm>250 && cm<300)
{
tone(8,220,200);
}
if (cm>200 && cm<250)
{
tone(8,440,200);
}
if (cm>150 && cm<200)
{
tone(8,880,200);
}
if (cm>100 && cm<150)
{
tone(8,1760,200);
}
if (cm>30 && cm<100)
{
tone(8,3520,200);
}
/* Délai d'attente pour éviter d'afficher trop de résultats à la seconde */
delay(100);
}
/https%3A%2F%2Fstorage.canalblog.com%2F52%2F66%2F1076594%2F118612332_o.jpg)
/https%3A%2F%2Fhackster.imgix.net%2Fuploads%2Fattachments%2F228021%2Fs72hqE6cgvSCK3uoLExL.uploads%2Ftmp%2F15eebe6d-0e94-44df-a495-bb7d8008cbb2%2Ftmp_image_0%3Fauto%3Dcompress%2Cformat%26w%3D600%26h%3D450%26fit%3Dmin)
/https%3A%2F%2Fstorage.canalblog.com%2F85%2F71%2F1076594%2F117085213_o.jpg)
/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)